Der erste Post zum Thema ist zwar schon sehr lange her, aber: Mein Versuch einen Quadrocopter zu bauen ist in vollem Gange. Tatsächlich hat meine selbst „entworfene“ Flugsteuerung schon etwas Ähnlichkeit mit einigen Flugsteuerungen, die es fertig zu kaufen gibt. Zumindest sieht man auch Pin-Gruppen, auf die später Kabel aufgesteckt werden können 😉
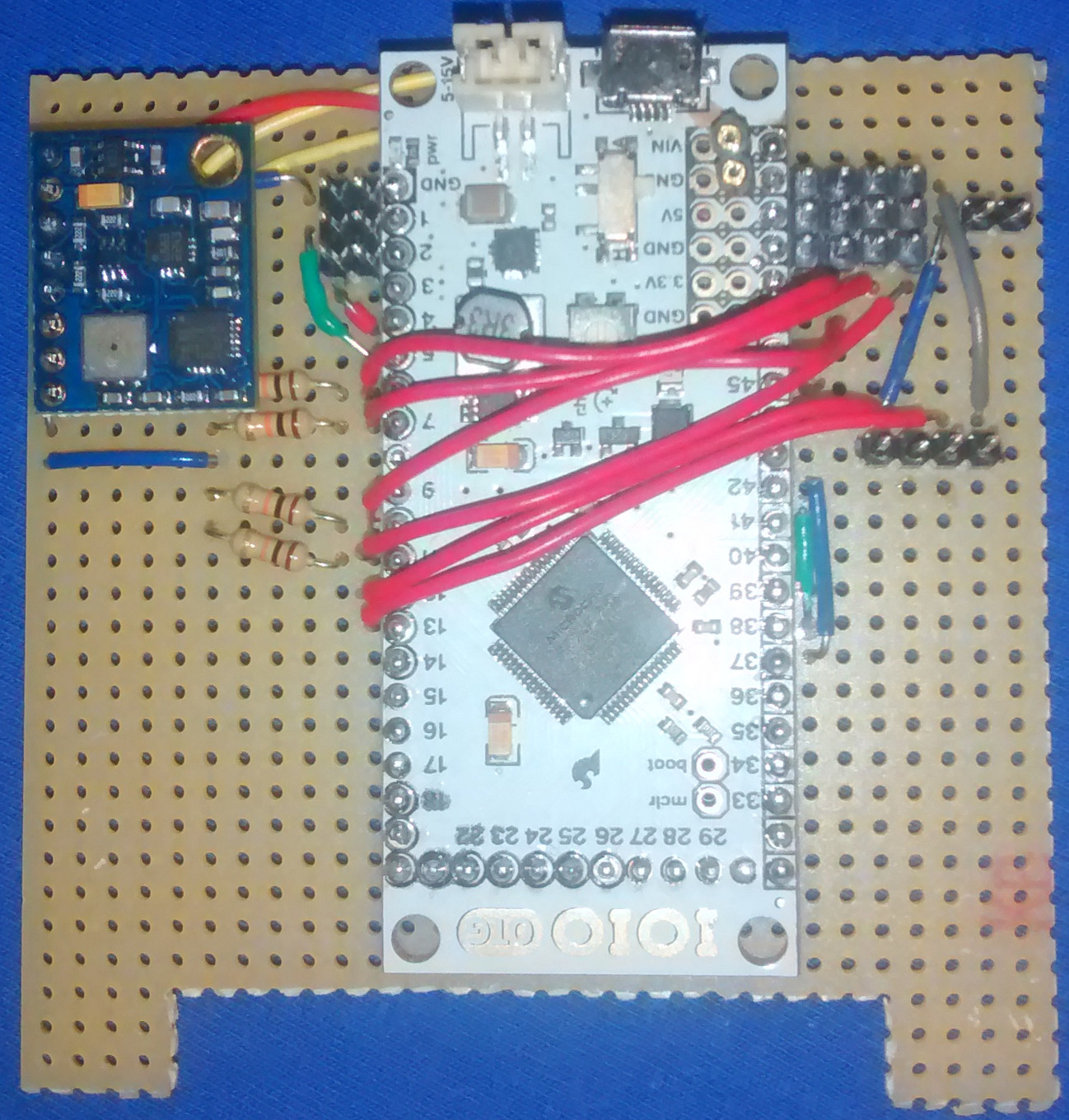
Auf dem Bild zu sehen ist oben links die Sensorplatine. Darauf befinden sich ein Beschleunigungssensor, ein Gyroskop, ein Barometer und ein Magnetfeldsensor. Diese Sensoren werden über I²C angesprochen werden. Direkt rechts daneben befinden sich einige Pins. Diese sind zum Anschließen der Ultraschall-Sensoren. Zumindest sind hier die Anschlüsse „GND“, „ECHO“ und „TRIG“ (jeweils zwei mal, denn ich plane mit zwei Ultraschall-Sensoren). Die Pins für die Stromversorgung dieser Sensoren befinden sich ganz rechts am Rand (das zweier Grüppchen). Das liegt einfach daran, dass das IOIO-Board auf der linken Seite seine 5V-kompatiblen Pins hat und auf der rechten Seite die 5V-Versorgung liegt. Da die Sensoren mit Jumper-Kabeln an die Flugsteuerung angeschlossen werden ist das aber kein Problem, schließlich macht es keinen großen Unterschied, ob ich das Kabel an der linken oder rechten Seite der Platine anstecke.
Die (große) Pin-Gruppe, auf der rechten Seite, ist zum Anschluss der ESCs. Diese Position ist gut geeignet, da das IOIO-Board hier 5V und GND direkt nebeneinander bietet. Leider ist hier die Verbindung der Signal-Pins zu den 5V-kompatiblen Pins auf der linken Seite des Boards besonders hässlich geworden. Aber daraus lernt man, nächstes Mal besser zu Planen und sich vorher zu informieren, welche Pins wo sind. 😉 Ein Stück weiter unten befinden sich noch die vier UART Pins. Hierüber wird eine Funkverbindung zum Notebook aufgebaut werden.
Rechts und links unten ist noch einiger Platz frei. So kann man in Zukunft noch einiges hinzufügen (zum Beispiel LED-Beleuchtung, weitere Sensoren, etc.).